UWB技术在非常宽的频谱范围内采用低功率脉冲传输数据而不会对常规窄带无线通信系统造成大的干扰,并可充分利用频谱资源,所以基于UWB技术而构建的高速率数据收发机有更广泛的用途。
今天我们主要探讨的就是UWB定位算法,对于做IC的人来说,往往会忽略芯片的应用场景,对芯片具体应用场景有所了解的话,才能有更深入的理解芯片设计,这是非常重要和必要的。下面就重点介绍UWB的三种定位/测距算法,最后探讨下这些算法对Transceiver的要求。UWB的测距/定位方法总结下来有三种:TOA,TDOA和PDOA,下面分别做介绍:
TOA (Time of arrival 到达时间)这种方法通过测基站到标签的传播时间,和电磁波速度相乘得到距离,这种方法需要发送端和接收端严格的时钟同步,否则会出现时间偏差,带来测距偏差。基于TOA原理的TW-TOF方法更常用,TW-TOF即 two way time of flight, 双向飞行时间法,原理如下图所示,A发B收,再B发A收,A发收的时间差为ta,B收发的时间差为tb,ta和tb的时间差为电磁波在A B来回一次的时间,便可以计算出A B之间间距,这种方法不需要A和B时钟同步,但为了计算时间绝对值的准确性,需要时钟精度高,否则会带来偏差。为了减小时钟偏差带来的测距误差,可以采用正反二个方向测量,下图所示称为正向测量,再反向测量,即B发A接收,A响应后发B接收,通过多次的正反方向测量,并求平均,可以减小时钟偏差的影响,提高测距的精确度。
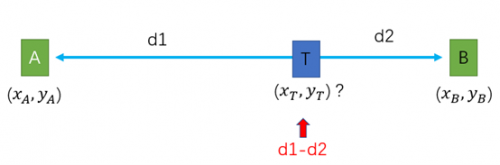
TDOA (Time Difference of Arrival, 到达时间差)TDOA通过测量二个基站和标签在空气中传播的时间差,来得到二个基站和标签的距离差。对于一维空间,如下图,如果已知基站A和基站B的坐标,便可以通过距离差d1-d2来计算出标签T的坐标。TDOA相对TOA方法,用时间差而非绝对时间,不用加入专门的时间戳,定位精度有所提高,并且通信次数减少,定位速度更快。
对于二维空间,TDOA算法就需要三个基站定位标签,三个基站产生二个时间差数据,可解二维空间坐标,如下图示意,二个双曲线的交点就是标签B所在的位置,但图中也可以看出,有二组蓝线和粉红线,产生二个交点,想知道B位于哪个交点,需要判断A1, A2和A3收到B发送的数据的先后顺序,得到d1, d2和d3的相对大小,这样便确定是哪组蓝粉红线产生的交点。
对于三维的空间,用TDOA的方法,就需要四个基站合理的布置,得到三个距离差,通过计算可得到标签所在的三维空间坐标。
PDOA (Phase Difference of Arrival, 到达相位差)PDOA是通过相位差来定位的算法,二维空间中,如下图所示,B有二个天线接收端,二个天线间距d已知,通过测量二个天线接受信号的相位差求接收信号的时间差,可计算角度,最终可求解距离。
如果是三维空间,则需要有三个天线接收端,间隔一定距离排布这些天线。
本文由铱微云UWB室内定位系统小编整理发布,铱微云物联网专业提供UWB室内人员定位、超宽带室内定位、高精度室内定位、高精度定位、二维定位、化工厂人员定位、养老院人员定位、隧道人员定位、煤矿井下定位、电厂人员定位、资产定位等产品及整体解决方案。








 业务咨询
业务咨询
 诚征代理
诚征代理
 029-81871735
029-81871735